Minwoo Jung
Robust Perception and Mobile Robotics Lab. / Seoul National University

I am a Ph.D. candidate in Mechanical Engineering at Seoul National University (SNU), advised by Prof. Ayoung Kim in the Robust Perception and Mobile Robotics Lab. My research focuses on LiDAR SLAM, sensor fusion, and place recognition for robust robot localization across heterogeneous sensors and long-term environments.
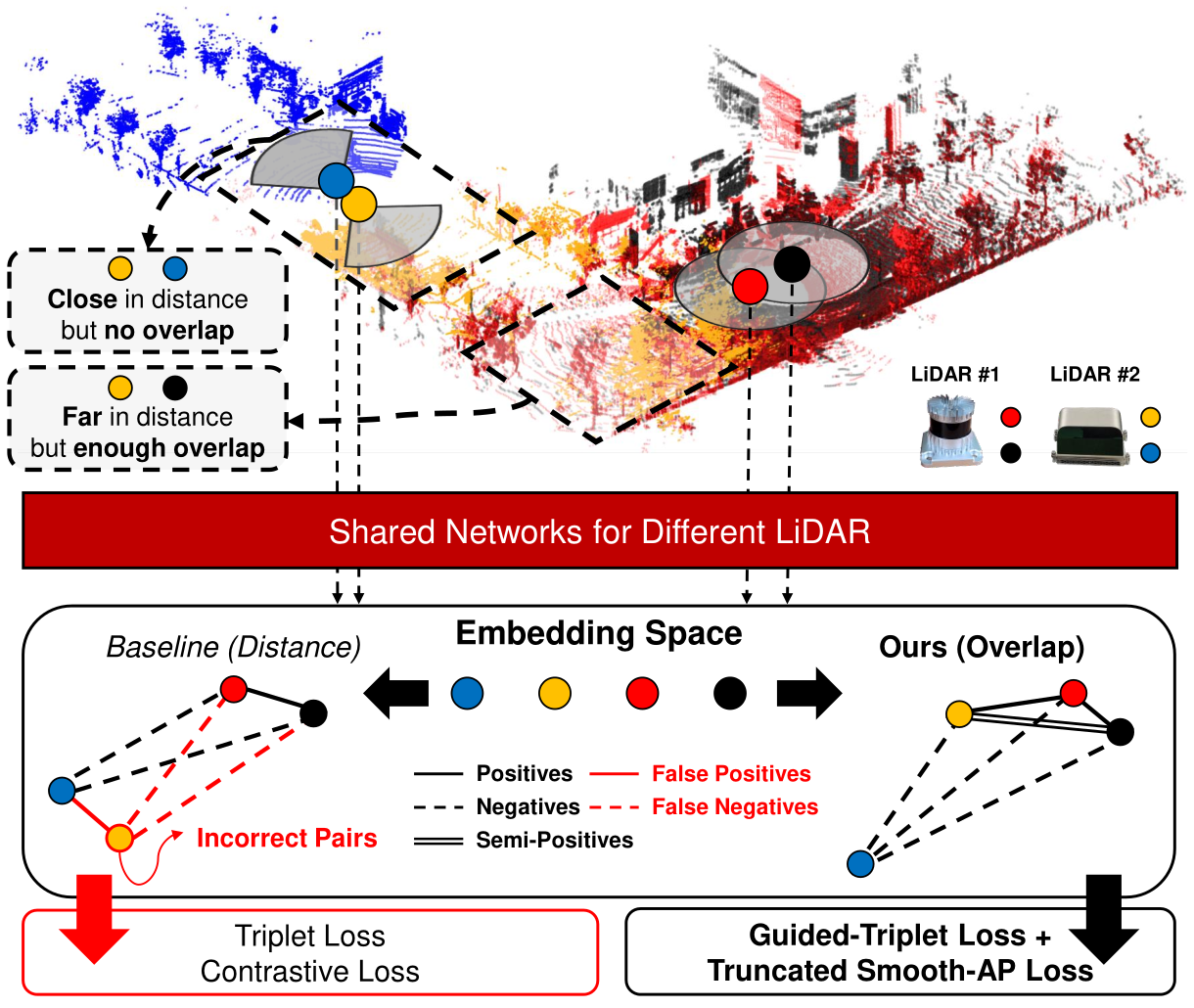
Before starting my Ph.D., I received my M.S. in Mechanical Engineering from SNU and my B.S. in Civil and Environmental Engineering from KAIST. During my graduate studies, I have worked on multiple LiDAR-inertial odometry, heterogeneous LiDAR place recognition, radar-LiDAR localization, and large-scale datasets for autonomous navigation.
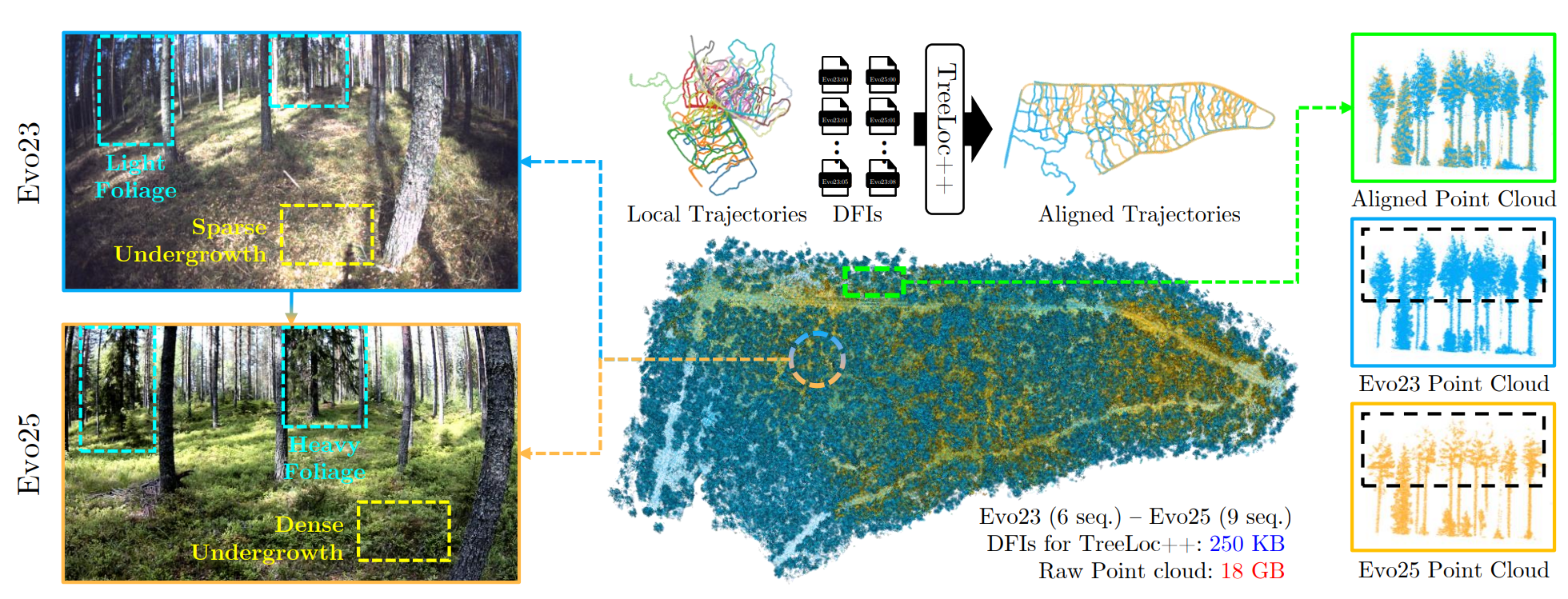
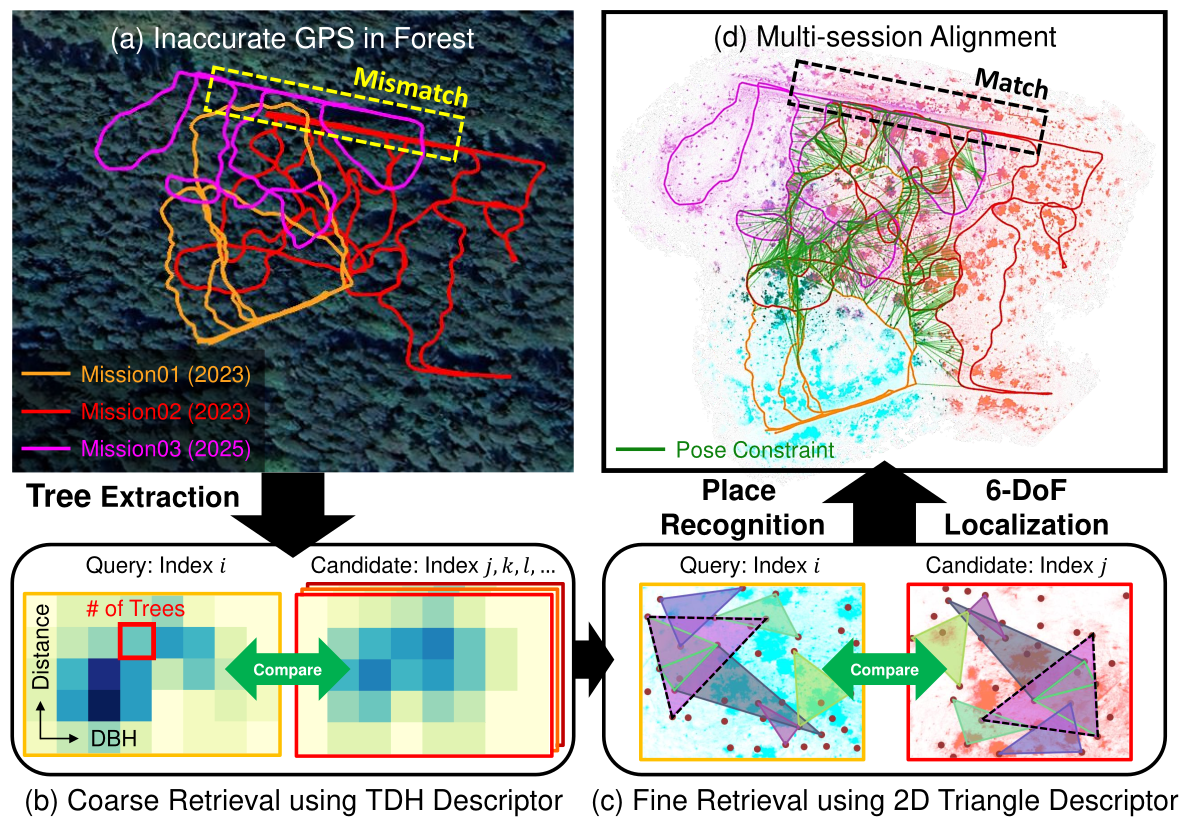
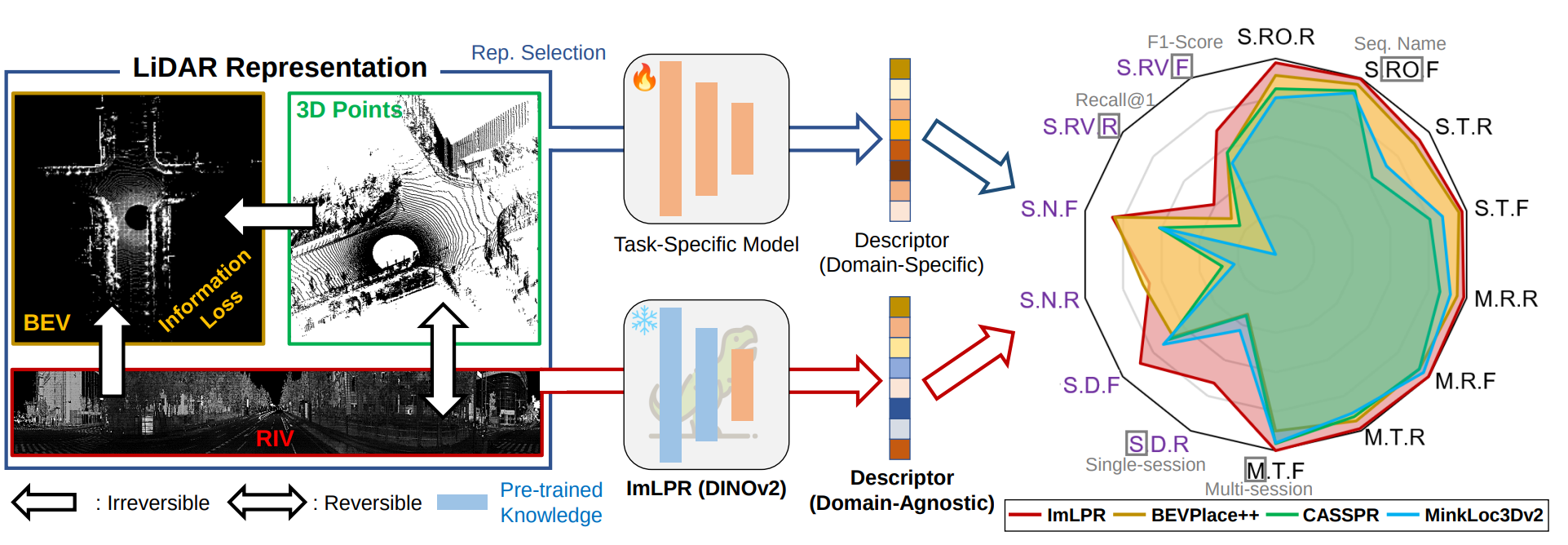
I was a visiting research student with the Oxford Robotics Institute DRS Group in 2025, where I collaborated on LiDAR place recognition with vision foundation models and geometric localization in forest environments.
news
| Jul 2026 | Attended ICML 2026 in Seoul, Korea. |
|---|---|
| Jul 2026 | Attended ICROS 2026 in Daegu, Korea. |
| Jul 2026 | TreeLoc++ was accepted to IEEE Transactions on Field Robotics (T-FR) (1st author). |
| May 2026 | Will present TreeLoc at ICRA 2026 in Vienna, Austria. |
| Apr 2026 | Gave the tutorial ICP and LiDAR Localization for the Multidisciplinary Creative Class. |
| Mar 2026 | Published Geometrically-Constrained Radar-Inertial Odometry in RA-L (3rd author). |
| Feb 2026 | Gave the tutorial Understanding 3D LiDAR Point Clouds and Their Practical Usage for the Machine Intelligence Industry-Academia Open Lecture and Consulting program. |
| Feb 2026 | Attended KRoC 2026 at Alpensia Convention Center, Pyeongchang, Korea. |